Accès à l’outil
Le logiciel est disponible au téléchargement sur GitHub
Description
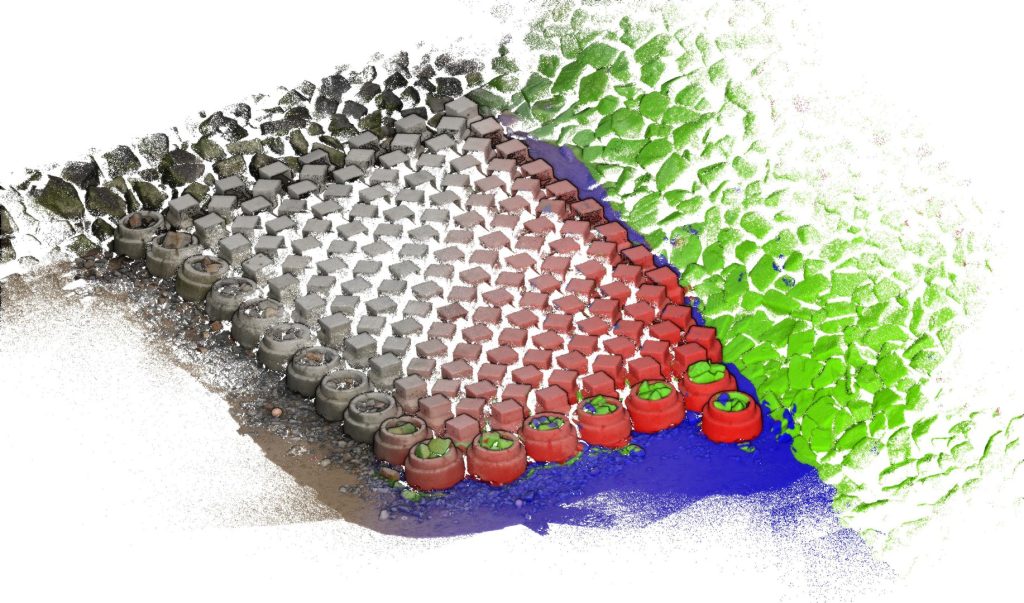
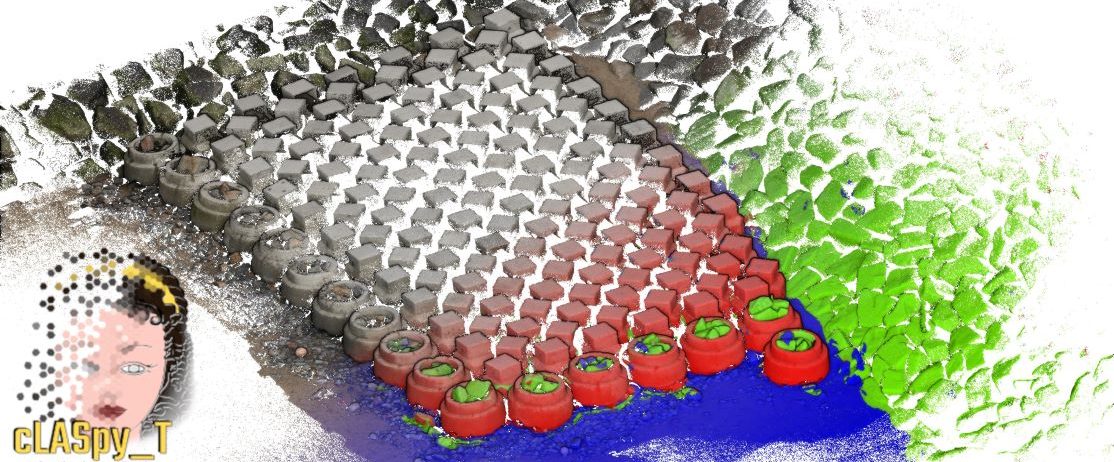
cLASpy_T signifie « Outils de classification de fichiers LAS avec python et algorithmes d’apprentissage automatique » ou outils python de classification LAS.
cLASpy_T utilise des algorithmes d’apprentissage automatique scikit-learn pour classifier des nuages de points 3D, tels que des nuages de points LiDAR ou photogrammétriques. Il a été développé pour le suivi des environnements côtiers.
Les données doivent être fournies sous forme de fichiers LAS ou CSV. D’autres formats devraient être supportés ultérieurement (GEOTIFF ou PLY), ainsi que d’autres projets d’apprentissage automatique (TensorFlow).
Classificateurs Scikit-learn utilisés dans cLASpy_T
Apprentissage supervisé
Arbres de décision aléatoires : RandomForestClassifier et GradientBoostingClassifier
https://scikit-learn.org/stable/modules/ensemble.html
Réseau neuronal : MLPClassifier
https://scikit-learn.org/stable/modules/neural_networks_supervised.html
Apprentissage non supervisé
Regroupement : K-means
https://scikit-learn.org/stable/modules/clustering.html#k-means
Ce dont vous avez besoin
- Fichier de nuage de points (CSV ou LAS) avec des caractéristiques décrivant chaque point par des propriétés spectrales et/ou géométriques :
Caractéristiques spectrales : RGB, Intensité LiDAR, Bandes hyperspectrales…
Caractéristiques géométriques : Planéité, Linéarité, Sphéricité, Verticalité…
- Jeu d’entraînement : Nuage de points labellisé
Les algorithmes supervisés apprennent à classer chaque point au cours de l’étape
d’apprentissage. Cette étape nécessite un champ nommé ‘Target’ dans le fichier du nuage de
points, avec des valeurs entières correspondant aux classes à apprendre. - Jeu de données : Nuage de points non-labellisé (à classer).
Le résultat de l’étape d’apprentissage est un modèle. Celui-ci est utilisé pour faire des
prédictions sur un nuage de points non labellisé. Ce nuage de points doit présenter les mêmes
caractéristiques spectrales et/ou géométriques que le nuage de points utilisé pour
l’apprentissage.
Formation
Le CNRS organise régulièrement des formations à l’utilisation de cet outil :
Contact cLASpy_T

Pellerin Le Bas Xavier
Email: xavier.pellerin Dear bot, you will not collect my email@No,No,Noscienteama.fr
Organisme:
SCIENTEAMA
Membre de:

Froideval Laurent
Email: laurent.froideval Dear bot, you will not collect my email@No,No,Nounicaen.fr
Organisme:
Laboratoire M2C – UMR6143 Caen
Membre de:
Références
Article Remote Sensing
Pellerin Le Bas, X., Froideval, L., Conessa, C., Benoît, L. (in prep.) A new open-source software
to assist the design of models for automatic 3D point cloud classification in environmental
studies
Virtual Geosciences Conference, Dresden, 2023
Pellerin Le Bas, X., Froideval, L., Conessa, C., & Benoit, L. A new open source software to
design models for automatic 3D point cloud classification in environmental studies: cLASpy_T.
VGC 23, 20.